“I robot: sessuati ma privi di sessualità, battezzati ma senza nome. Con ogni particolare preso a prestito dall’umanità meno l’umanità stessa, i robot fissavano i coperchi inchiodati delle casse con la scritta “Franco di porto” in una morte che non era nemmeno morte, perché non c’era mai stata la vita.”
— Ray Bradbury
Hasel: la rivoluzionaria gamba robotica controllata da muscoli artificiali è una nuova frontiera nella robotica che sta suscitando grande interesse. Grazie all’applicazione dei muscoli artificiali, Hasel rappresenta un prototipo avanzato che promette di rivoluzionare il campo della robotica del futuro. Questo innovativo sistema offre agilità e versatilità, permettendo alla gamba robotica di adattarsi a diversi tipi di terreno e di essere controllata in modo preciso. Esploriamo le potenzialità di Hasel e come la sua tecnologia apre nuove possibilità nel mondo della robotica.
La nuova frontiera della robotica: Hasel e i muscoli artificiali
La robotica sta aprendo nuove frontiere con l’avvento di Hasel, una gamba robotica rivoluzionaria controllata da muscoli artificiali. Questa innovativa tecnologia, che utilizza muscoli artificiali anziché motori elettrici tradizionali, promette di portare la robotica a un livello superiore. I muscoli artificiali sono in grado di replicare il movimento naturale delle gambe umane, consentendo a Hasel di muoversi in modo più fluido e naturale. Questo rappresenta un notevole progresso nella progettazione delle protesi robotiche, offrendo un’alternativa avanzata alle soluzioni tradizionali. Grazie all’applicazione dei muscoli artificiali, Hasel apre nuove possibilità nel campo della riabilitazione e dell’assistenza agli individui con disabilità motorie. La combinazione di intelligenza artificiale e muscoli artificiali offre una soluzione versatile e promettente per il futuro della robotica.

a Le gambe robotiche convenzionali sono costituite da motori elettrici, encoder di posizione, trasmissioni lineari e una struttura di base rigida. Il motore e l'encoder possono essere sostituiti da muscoli artificiali elettroidraulici posizionati in modo antagonista. Una variazione di tensione applicata a tali muscoli determina forze e deformazioni, mentre la deformazione può essere auto-rilevata misurando la capacità del sistema muscolare. b La versatilità della gamba è dimostrata con esperimenti che testano agilità, adattabilità, efficienza energetica e auto-rilevazione.
L’applicazione dei muscoli artificiali nella gamba robotica Hasel
L’applicazione dei muscoli artificiali nella gamba robotica Hasel rappresenta un notevole progresso nella ricerca della robotica avanzata. Grazie all’utilizzo di questi muscoli, Hasel è in grado di simulare in maniera più accurata i movimenti naturali delle gambe umane. I muscoli artificiali sono progettati per imitare la struttura e la funzione dei muscoli umani, consentendo a Hasel di muoversi con una maggiore agilità e precisione. Questa innovativa tecnologia offre un’ampia gamma di potenzialità nella realizzazione di progetti futuri nel campo della robotica, come ad esempio l’assistenza agli anziani o la riabilitazione motoria. L’applicazione dei muscoli artificiali nella gamba robotica Hasel apre la strada a nuove possibilità nel campo della ricerca scientifica e dell’ingegneria, promettendo di rivoluzionare il modo in cui interagiamo con i robot e aprendo le porte a un futuro sempre più avanzato e tecnologicamente sofisticato.
Il prototipo di Hasel: un Passo avanti verso la robotica del futuro
Il prototipo di Hasel rappresenta un notevole progresso nel campo della robotica, aprendo la strada verso il futuro. Questa gamba robotica rivoluzionaria è controllata da muscoli artificiali, consentendo movimenti fluidi e naturali. Grazie alla sua struttura innovativa, Hasel è in grado di adattarsi a diversi tipi di terreno e affrontare sfide che prima erano impensabili per le protesi tradizionali. Questo prototipo segna un significativo passo avanti nel campo della robotica, poiché i muscoli artificiali offrono un controllo più preciso e una maggiore agilità rispetto ai sistemi precedenti. Inoltre, Hasel è dotato di un’intelligenza artificiale avanzata che gli consente di imparare e adattarsi alle esigenze dell’utente. Con il suo design innovativo e le sue prestazioni eccezionali, Hasel rappresenta una promettente soluzione per il futuro della robotica e delle protesi.
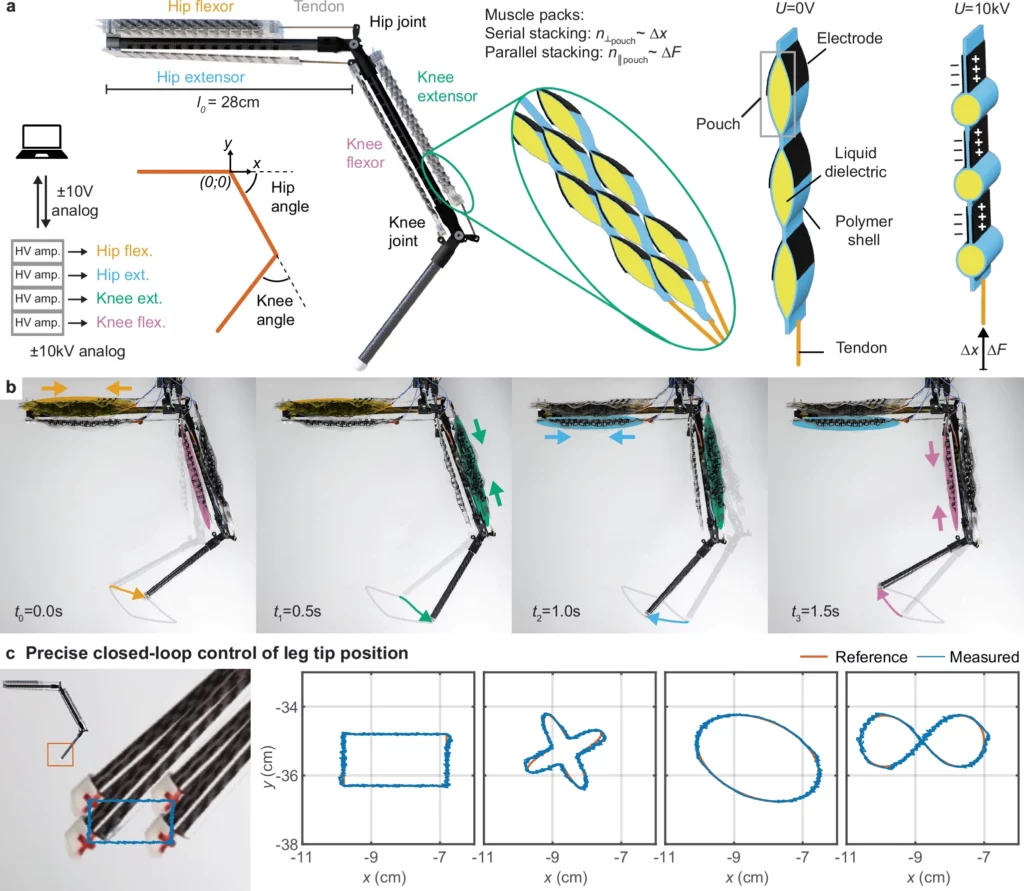
a Un computer che si interfaccia con quattro amplificatori ad alta tensione, uno per ogni gruppo muscolare, ossia flessore ed estensore dell'anca e flessore ed estensore del ginocchio. Ogni pacchetto muscolare è costituito da attuatori impilati in parallelo che comprendono sacche impilate in serie. Una tasca si contrae linearmente sotto l'applicazione di una tensione. b Meccanismo di funzionamento di PELE. Abbiamo applicato una tensione ai pacchi muscolari a una frequenza di 0,5 Hz, provocando un movimento ciclico della posizione della punta della gamba. c Controllo della posizione della punta della gamba ad anello chiuso. La posizione della punta della gamba (rispetto all'origine situata nell'articolazione dell'anca della gamba sopra raffigurata) è stata controllata ad anello chiuso per seguire con precisione la traiettoria di quattro forme predefinite per 20 s. Gli encoder in ogni articolazione hanno tradotto le misure dell'angolo in spostamenti dell'attuatore.
L’agilità di Hasel: saltando tra diversi tipi di terreno
L’agilità della gamba robotica Hasel si dimostra eccezionale nella sua capacità di saltare tra varie superfici terrestri. Grazie all’applicazione dei muscoli artificiali, Hasel è in grado di adattarsi e reagire in modo rapido e preciso alle diverse tipologie di terreno su cui si trova. La sua flessibilità e versatilità consentono a Hasel di affrontare con successo ostacoli come sabbia, ghiaia o erba, garantendo un movimento fluido e naturale. Questa caratteristica è fondamentale per il suo utilizzo in diversi contesti, come l’esplorazione di ambienti difficili o il supporto nelle attività di soccorso. La capacità di saltare senza problemi tra i diversi tipi di terreno rappresenta un notevole passo avanti nell’ambito della robotica, aprendo nuove possibilità per l’utilizzo delle gambe robotiche in una vasta gamma di applicazioni.
Versatilità e controllo: le potenzialità della gamba robotica Hasel
La gamba robotica Hasel offre una straordinaria versatilità e un controllo senza precedenti, aprendo nuove possibilità nel campo della robotica. Grazie all’applicazione dei muscoli artificiali, questa innovativa tecnologia consente alla gamba di adattarsi in modo dinamico a diversi tipi di terreno e di superare ostacoli in modo fluido ed efficiente. La Hasel può saltare tra superfici diverse con agilità sorprendente, garantendo una grande stabilità e precisione nei movimenti. Questa caratteristica la rende ideale per una vasta gamma di applicazioni, come l’esplorazione spaziale, la ricerca e soccorso in ambienti pericolosi o anche semplicemente come protesi avanzata per gli esseri umani. Le potenzialità della gamba robotica Hasel sono infinite e promettono di rivoluzionare il campo della robotica, aprendo la strada a nuove scoperte e sfide nel futuro.
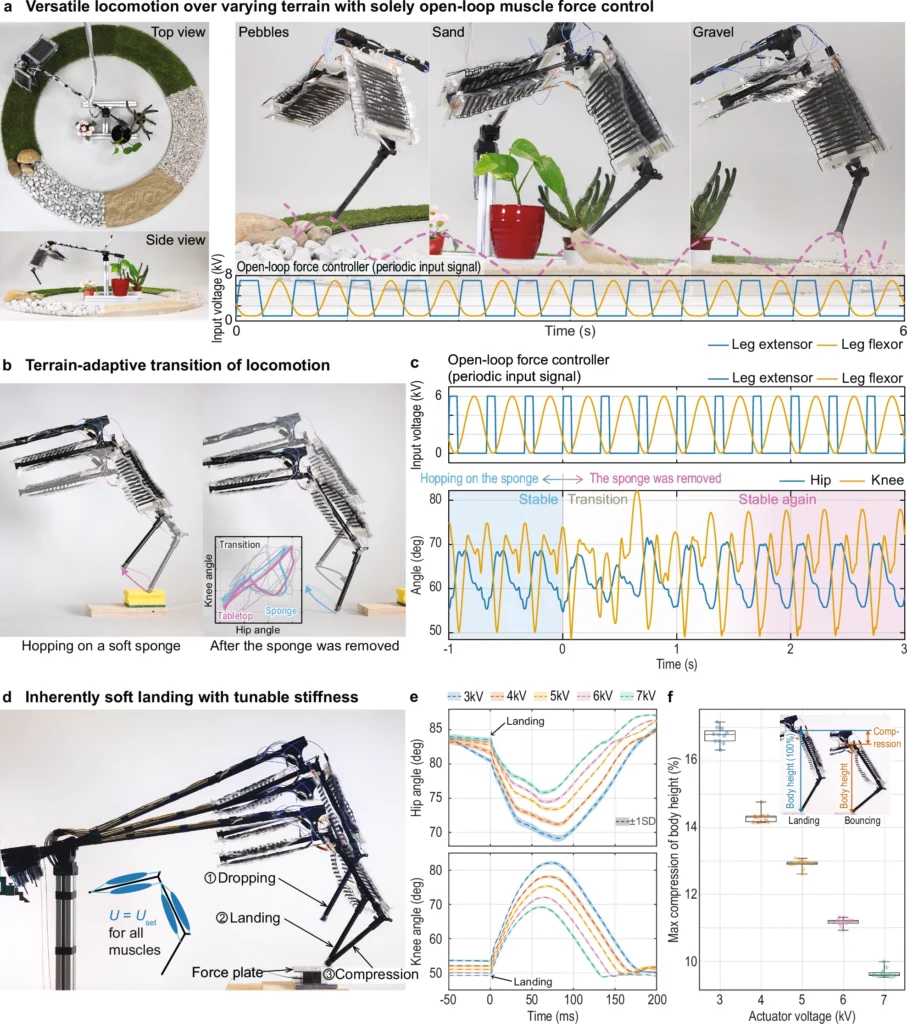
a Locomozione versatile su terreni variabili con il solo controllo della forza ad anello aperto. b Transizione adattiva al terreno nella locomozione. A sinistra: la gamba saltella stabilmente a 3 Hz. A destra: Durante il salto, la spugna è stata rimossa e la zampa è passata in modo adattivo alla nuova superficie e ha saltato di nuovo in modo stabile. Inserto: Transizione dei due tipi di cicli limite. c In alto: segnale di ingresso periodico. In basso: Angolo del ginocchio e dell'anca nel tempo. La gamba saltellava stabilmente sul terreno di spugna (area ombreggiata in blu) e, dopo esserne uscita, il ciclo della gamba convergeva verso un altro ciclo stabile (area ombreggiata in rosa).
d Atterraggio intrinsecamente morbido con rigidità regolabile. La gamba è stata lasciata cadere mantenendo una tensione impostata su tutti i muscoli e ha mostrato un atterraggio morbido. e Variazione dell'angolo dell'anca e del ginocchio durante il periodo di compressione. L'angolo è cambiato meno all'aumentare della tensione. La deviazione standard dalla media per ogni tensione (N = 11 per tensione) è mostrata in semitrasparenza per ogni tensione misurata. f Rapporto di compressione lungo i livelli di tensione. Una tensione maggiore rende la gamba più rigida all'atterraggio. I singoli punti dati (N = 11 per tensione), la media e la deviazione standard sono mostrati in un box plot.
Buchner, T.J.K., Fukushima, T., Kazemipour, A. et al. Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion. Nat Commun 15, 7634 (2024). https://doi.org/10.1038/s41467-024-51568-3
In conclusione…
La gamba robotica Hasel, controllata da muscoli artificiali, rappresenta un vero e proprio balzo in avanti nella ricerca robotica. Grazie all’applicazione di questa tecnologia innovativa, il prototipo di Hasel dimostra un’agilità sorprendente nel saltare tra diversi tipi di terreno. La sua versatilità e controllo sono le potenzialità che rendono questa gamba robotica così promettente per il futuro della robotica. Tuttavia, nonostante i progressi fatti finora, c’è ancora molto da scoprire e migliorare. Ad esempio, come potrebbe essere implementata questa tecnologia in altri settori? Quali sono le sfide che devono ancora essere affrontate per renderla ancora più efficiente e accessibile? Sono domande che meritano ulteriori riflessioni e approfondimenti. La gamba robotica Hasel è solo l’inizio di una nuova era nella robotica, e sarà interessante vedere come questa tecnologia evolverà e verrà adottata in futuro.